 |
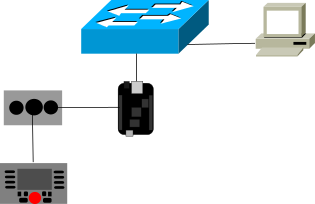
Die hier vorgestellte Lösung verwendet den ARM basierten Minicomputer
Beaglebone Black, da der Microcontroller des BBB schon integrierte CAN
Controller verfügt. Es fehlt lediglich ein Cape mit dem CAN Transceiver.
Wenn das Cape als CAN Anschluß eine RJ45 Buchse mit der Belegung des
CAN-digital-Bahn Projekthat, kann als Bus zum Anschluß an die Gleisbox
der Startpunkt des CAN-digital-Bahn Projekts verwendet werden. Eine Belegung
der Steckerleisten, die für ein Cape mit CAN Transceiver relevant sind,
findest sich in der Beschreibung von CircuitCo: CAN Bus Cape RevA auf
elinux.org. Die I2C Pins könen ignoriert werden. Da der CAN1 Controller
verwendet wird, kann der UART1 nicht benutzt werden. Damit liegen auf den UART1
Pins die folgenden Signale:
| UART1_TXD | - | dcan1_rx |
| UART1_RXD | - | dcan1_tx |
Weitere Infos können auch dem Technical Reference Manual von TI
entnommen werden. Dort ist unter der Beschreibung des Control Module auch
die Beschreibung der Pad Control Register mit dem die Modi für die Pins
konfiguriert werden. Diese Register werden aber schon durch den Device Tree
des Linux richtig programmiert, wenn CAN1 enabled ist.
|